
技术文章
Technical articles 更新时间:2017-08-26
更新时间:2017-08-26 点击次数:2843
点击次数:2843
电动助力转向系统(Electric power steering,简称EPS)是世界汽车电子控制技术发展的研究热点和前沿技术之一。国外汽车电动助力转向已部分取代传统液压动力转向(Hydraulic power steering,简称HPS)。目前国内清华大学、合肥工业大学等高校正从事该方面的研究,并取得了阶段性的成果,争取进一步改进与*,早日实现商品化。EPS 通过对控制器软件的设计,十分方便地调节系统的助力特性,使汽车能在不同车速下获得不同的助力特性,以满足不同的驾驶情况的需求。同时,EPS 用电动机直接提供助力,它能
节约燃料,提高主动安全性,有利于环保。
1、助力转向系统的类型及EPS的基本控制策略
1.1 助力转向系统的类型
(1)传统液压动力转向
液压动力转向的控制阀采用滑阀式,即控制阀中的阀以轴向移动来控制油路。这种滑阀式控制结构简单,生产工艺性好,操纵方便,宜于布置,使用性能较好。但是滑阀式控制阀灵敏度不够高,后来逐渐被转阀代替。
(2)电控液压动力转向
电控液压动力转向系统的种类很多,但其原理基本上都是通过在油泵或转向器上加装电子执行机构或辅助装置,根据车速信号来控制液压系统的流量或压力。
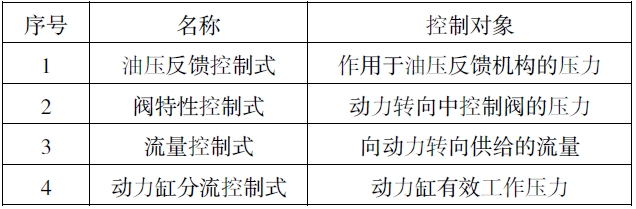
表1 电控液压动力转向系统的种类
(3)电动助力转向系统(EPS)的工作原理
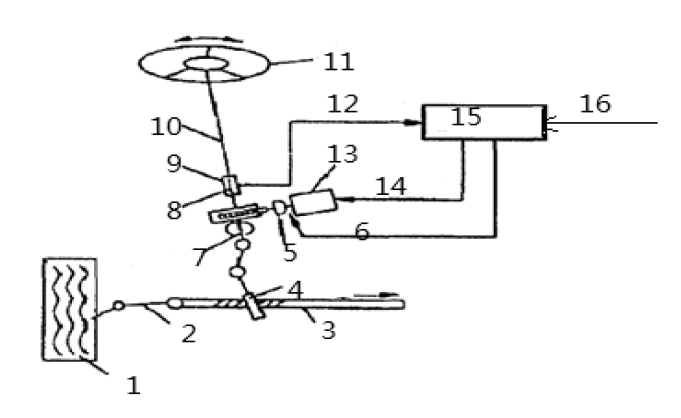
图1 EPS的控制系统示意图
1—车轮 2—拉杆 3—齿条 4—小齿轮 5—离合器 6—动力开关
7—输出轴 8—扭杆 9—转矩传感器 10—输入轴 11—方向盘
12—转矩信号 13—电机 14—电流控制 15—控制单元 16—车速信号
电动助力转向系统的基本组成包括:扭矩传感器、车速传感器、控制元件、电动机和减速机构等。图1 所示为配用齿轮齿条式转向器的EPS。信号控制器根据各传感器的输入信号确定助力扭矩的幅值和方向,并且直接控制电机。电机的输出扭矩由减速齿轮放大,并通过万向节、转向器中的传送装置把输出扭矩送到齿条,使之向转向轮提供助推扭矩。
系统的信号源包括:扭矩传感器、转向角传感器和车速传感器,转向角传感器可根据齿条的位移量和位移的方向来测出转向角。
(4)EPS 的关键部件
1.2 EPS 的控制原理图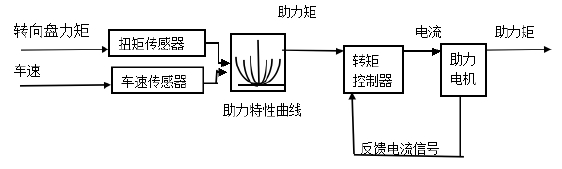
图2 汽车EPS控制原理图
EPS 主要部件包括传感器、电动机、减速机构和电子控制单元等。
在掌握EPS 的工作原理前提下,将EPS 系统用框图表示如下。
1.3 EPS 的基本控制策略
根据汽车转向行驶的不同情况要求,EPS 按不同的控制方式进行控制,通常来说,对应汽车转向行驶的不同情况有四种基本控制方式。
(1)普通控制
普通控制(助力控制)是EPS 的基本控制模式。其控制过程主要是:根据车速传感器测得的车速信号和方向盘力矩传感器测得的方向盘力矩信号,调用助力特性控制表,并根据电动机的电磁转矩特性确定助力电流,以获得适当的助力转矩。
(2)回正控制策略
在方向盘“转向回正”时,对EPS 进行的控制为回正控制,目的在于改善系统的回正性能。转向时,前轮回正力矩使转向轮向直线行驶的状态变化。
回正控制的控制过程为:首先判断方向盘是否处于“转向回正”状态,当助力电机旋转方向和转向输入的旋转方向相反,进行“转向回正”控制,否则进行助力控制。
(3)阻尼控制策略
阻尼控制是EPS 为提高汽车高速直线行驶时的稳定性,减小路面冲击对方向盘的影响而采用的一种控制模式。阻尼控制是在普通控制确定的目标电流之上补偿阻尼控制电流,其主要是通过引入电动机转速的方法来实现。
(4)补偿控制策略
补偿控制策略是根据转向作用力的变化率沿力矩变化的方向产生补偿力矩,来克服电机的惯量、阻尼和摩擦对电机输出力矩的影响。补偿力矩的大小由电机的惯量、阻尼和摩擦力的大小及电机的转速、转向加速度和转动方向决定。
2、EPS仿真的初步研究及控制仿真验证
2.1 理想助力特性
配备电动助力装置的汽车转向系统,应尽可能不悖于驾驶员原有的驾驶习惯,这样驾驶员才能在转向时得心应手。方向盘力矩与助力矩之间的理想关系应具备以下特点:
(1)在输入转向力矩很小的区域,希望助力部分的输出越小越好,助力部分基本不起作用,以保持较好的路感。
(2)在常用的快速转向行驶区间,为使转向轻便,降低驾驶员劳动强度,助力部分发挥作用,助力效果要明显。
(3)原地转向时的转向阻力矩很大,应尽可能产生较大的助力转向效果,此时,助力矩增幅也应较大。
(4)随着车速的升高,方向盘力矩减小时,不助力的区域应增大,且在高速行驶至一定车速时停止助力,以使驾驶员获得良好的路感,保证行车安全。
(5)各区段过渡要平滑,避免操作力出现跳跃感,且助力矩不能大于同工况下无助力时的转向驱动力矩。将上述特点与原则量化,可得理想的助力特性曲线。如图3 所示,由于电动机输出转矩与电流间存在线性关系,因此该图反映出助力矩随行驶工况的变化规律,可以把它作为研究电动机控制规律的参照。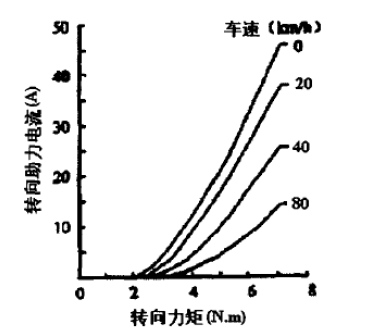
图3 理想助力特性
2.2 控制系统的选择
对助力电动机输出转矩的控制是EPS 研究的重点。由于电动机的输出转矩是由其工作电流决定的,因此助力控制可归结为对电动机电流的控制(如图4),其控制输入为车速信号和方向盘扭矩信号。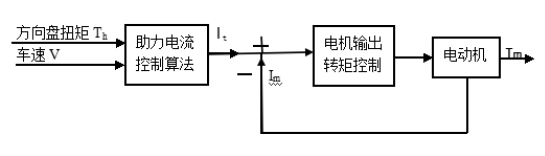
图4 控制系统框图
控制系统主要采用PID 控制系统。
PID 控制是zui早发展起来的控制策略之一,由于算法简单、和可靠性高,被广泛应用于过程控制和运动控制,尤其适用于可建立数学模型的确定性控制系统。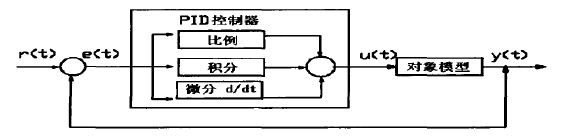
图5 典型的PID控制结构
图5 所示为典型的PID 控制系统结构。PID 控制器是由比例、积分和微分三个环节叠加构成的,各环节分别对误差信号e(t)进行运算,其结果的加权和将构成系统的控制信号u(t)一并送给对象模型。PID 控制器的数学描述为: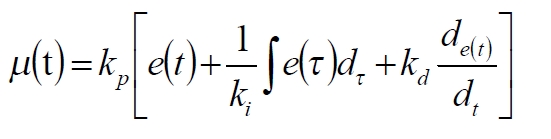
(公式1)
式中:kp—比例环节调整参数;
ki—积分环节调整参数;
kd—微分环节调整参数。
PID 控制器各环节所起的作用如下:
(1)比例环节抑止闭环系统的瞬态偏差信号e(r),通过增加kp值还可加快系统响应速度,提高闭环响应的幅值。但kp值不能无限制增加,对于不同的闭环控制系统kp的取值范围不同,超出该限制范围,系统将不稳定;
(2)积分环节主要用于消除系统的静差,提高系统的无差度。积分作用的强弱取决于积分的时间常数K;K 越大积分作用越弱,反之则越强。而过强的积分作用使系统的超调量增加,系统的稳定性变坏;
(3)微分环节能反映偏差信号的变化趋势(变化速率),并能在偏差信号值变大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。其不足之处是放大了噪音信号。

 当前位置:
当前位置:
