
技术文章
Technical articles 更新时间:2018-06-15
更新时间:2018-06-15 点击次数:3177
点击次数:3177
虚拟教学是指以虚拟现实技术为工具,对教学过程进行基于计算机的仿真,生成能够使学习者获得知识、经验的教学场景。虚拟教学是一种现代化的教学方法,是现实教学的一种延伸。虚拟教学极大解决了现实教学过程中来自时间和空间的限制,使学习过程更加灵活。虽然虚拟教学与实际的“面对面”的教学过程相比还有很大差距,但是它所具有的资源共享、方便的特点很大程度上拓展了教学的时空,解决了教学资源及教师紧张的问题。
虚拟教学所提供的教学场景是具有沉浸感、可交互性、并能启发操作者的仿真环境。在机械制图课程中引入虚拟教学,可以为学生提供更多的零件模型进行学习,可以使学生对机械产品装配过程有更深入的了解,从而可以提高学生的图形理解力,增强其空间想象能力,并激发工程创造力。因此,从1997 年至今机械制图的教学人员对该内容进行了广泛的研究,发表了很多这方面的论文。本文是在阅读这些文献的基础上进行的,第1 节指出机械制图虚拟教学的主要研究内容及虚拟教学系统的研究进展;第2 节总结虚拟教学环境的研究进展;第3 节讨论机械制图课程中虚拟教学的关键技术;第4 节对进一步加强虚拟教学提出建议。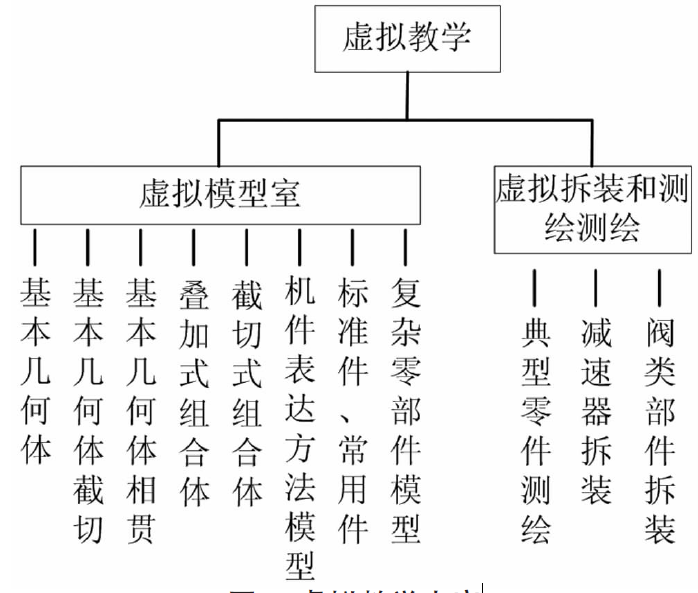
图1 虚拟教学内容
一、虚拟教学体系及主要研究内容
机械制图课程中的虚拟教学主要包括虚拟模型室、虚拟拆装和测绘的研究,如图1 所示。
虚拟模型室的建立主要作用是进行模型展示。通过大量的模型展示,开阔学生眼界,提高机械产品认知能力。其次,对照投影反复观看模型,可以帮助他们更好地理解“空间———平面、平面———空间”的对应统一关系,*其对三面投影的认识,帮助建立空间想象能力。再者,可以加强构型方法的学习。在体验式教学中,使用参数化建模的方法,通过修改基本几何体尺寸让学生更好地理解了相贯的概念,以及相贯线的变化趋势。]通过建立大量的三维虚拟模型,引导学生进行仔细观察、分析,使得难以想象的空间形体抽象概念易于接受。虚拟模型室的实现需要进行零件的造型设计、系统环境设计、以及模型的管理。
虚拟拆装和检测技术主要应用在零件图和装配图学习过程中。对减速器的工作原理进行了动画演示、说明,并提供了可以对减速器进行虚拟拆装的虚拟教学环境。学生可以在计算机上反复进行减速器的拆装,从而对减速器的机械结构,零部件之间的相互连接、转动的传递,正确的拆装方法都有了非常深入的了解。
研究开发了可以进行虚拟测绘的场景。包括扳手、钳等拆装工具的使用,游标卡尺、螺纹尺等测绘工具的使用,和测绘过程的学习。实现这样的虚拟教学系统除了要进行模型的处理,还涉及到虚拟装配的关键技术,如碰撞、约束等内容。
通过分析,并结合虚拟现实技术的发展现状,笔者给出一个虚拟教学系统体系结构,如图2 所示。交互层包括可以进行人机交互的硬件设备,并为虚拟教学环境的实现提供了基础。功能层包括所实现的功能,而层和数据层为这些功能的实现提供。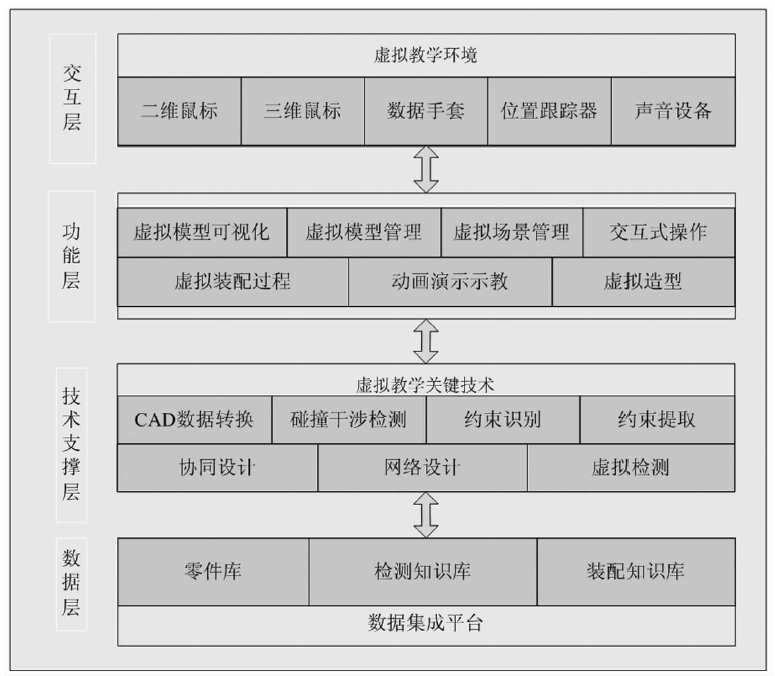
图2 虚拟教学系统体系结构图
下面本文将对系统的核心内容虚拟教学环境研究、虚拟教学的关键技术研究进行重点说明。
二、虚拟教学环境的研究
根据虚拟现实系统所使用的虚拟设备和产生的沉浸感的不同,虚拟现实系统可以分为CAVE 式虚拟系统、头盔式虚拟系统和桌面式虚拟系统。在机械制图课程的虚拟教学中,所采用的虚拟现实系统均为桌面式系统,如图3所示。这是因为机械制图课程虚拟教学的主要目的是提高学生的图形理解力,通过虚拟教学系统加强学生对零件测绘和机器部件装配知识的了解。过多的虚拟硬件设备不仅增加了虚拟教学系统的成本,也会迫使学生花大量时间熟悉硬件使用,而忽略系统本身的作用。
虚拟教学环境的构建主要是基于各种虚拟平台进行如VIrtools、VRML、Cult3D 等。这些虚拟平台可以实现在网页上建立交互的三维对象,通过鼠标、键盘对三维对象进行旋转、缩放,同时也提供了事件、动作等属性,以及基于JAVA 的开发接口,使得用户可以完成更复杂的控制。基于VRML 的虚拟教学的实现流程,如图4 所示。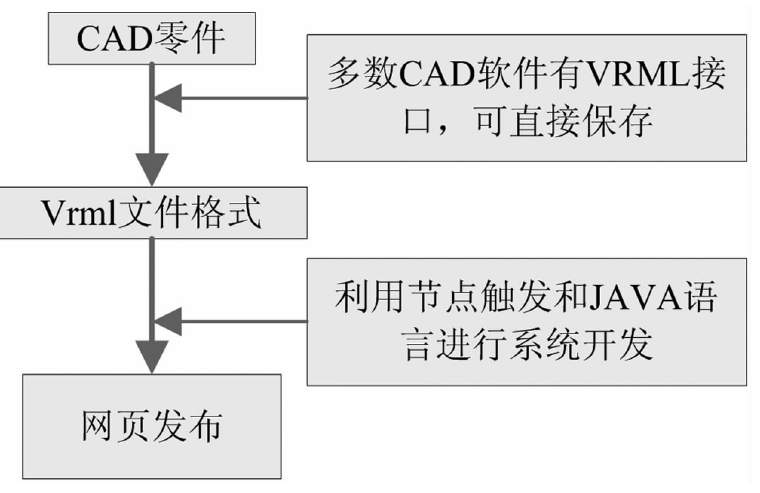
图4 基于VRML 的开发流程
除了上述几种软件,也有习惯于C 语言的用户基于底层OpenGL 进行虚拟教学系统的开发。
三、关键技术的研究
作为新兴的研究内容,虚拟教学的发展与计算机技术、人工智能技术等多个学科紧密相关,涉及的关键技术包括仿真与可视化研究、CAD 模型的格式转换、虚拟系统中零件的定位与约束、虚拟检测、协同设计、人机交互等多个方面。
根据对虚拟教学的影响程度,下面对几个重要的关键技术分别来进行论述。
(一)虚拟模型及格式转换
虚拟模型是虚拟教学的基础,而机械制图课程更是不能缺少立体模型的辅助。模型的好坏对终的教学系统影响巨大。目前大部分虚拟现实软件都没有*的建模功能,因此仍然需要从CAD 软件进行造型,然后再通过数据格式转换,生成虚拟系统可以接受的文件格式,再进行虚拟操作。
机械制图虚拟教学中常用的CAD 软件有Pro/E、Solidworks、Inventor、UG 等。在进行格式转换时,有些软件可以与相对应的虚拟现实进行对接,如Pro/E 与Division Mockup虚拟现实系统,由于属于同一公司开发,因此可以直接进行格式转换;但是大多数软件则需要开发专门的转换接口或者以标准化数据格式为中间文件进行格式上的转换,如图5 所示。
目前的虚拟教学研究,主要采用的是以标准化数据接图3 桌面式虚拟系统 口为中间文件进行数据格式的转换。相对于接口,该方法易于实现。
(二)虚拟环境中的约束与定位
在虚拟环境中进行零件的测绘或者装配操作,必须要进行零件的定位,而虚拟现实环境本身缺乏现实环境中存在的各种物理约束和感知能力,因此需要依靠自定义方式进行定位。目前比较通用的定位模式是基于约束的定位,包括基于几何位置约束的定位、基于碰撞的约束定位,以及基于装配语义约束的定位。
基于几何位置约束是指通过定义零部件的几何坐标位置进行装配,这种情况下会出现零部件的刺穿情况。而如果使用基于碰撞的约束,为零件设置合适的包围盒,通过碰撞检测算法对于可能碰撞的地方进行计算,则可以提高系统的拟实性,这也是目前多数虚拟系统所用的定位方法。
(三)虚拟测绘
零件测绘是机械制图课程的重要内容。因此虚拟测绘也是虚拟教学的研究内容之一。由于缺乏力反馈等虚拟硬件设备的支持,现在的虚拟测绘多数是对于选定点之间的坐标计算,即首先确定需要测量的两个点,之后计算两点之间的坐标差。该方法的本质是点到点之间的距离测量,因此选取精度会直接影响测绘结果。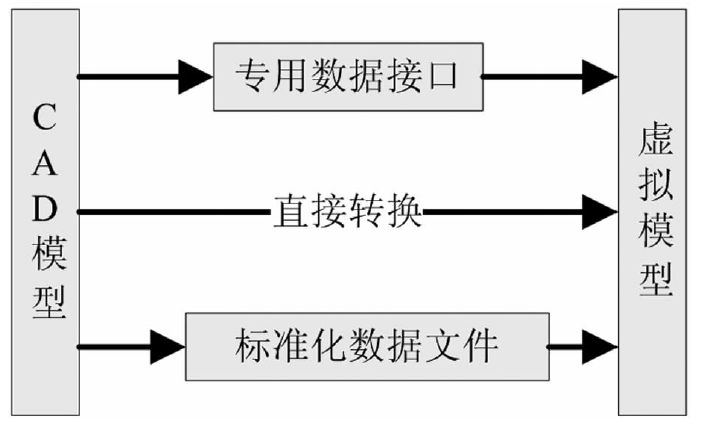
图5 数据转换
四、结束语
虚拟现实作为一种先进的辅助教学手段,提高了学生的学习积极性和图形理解力。近年来关于机械制图的虚拟教学活动的研究,也取得了很大进展。但如何提高系统的交互性,体现以学生为中心,增强学生在虚拟场景中的主观性,促进创新能力和精神的培养,鼓励学生进行协同操作,以及建立合理的虚拟教学评价机制仍需要进一步研究。

 当前位置:
当前位置:
